
Pada kwartal pertama 2018, saya telah berhasil menciptaklan produk terbaru berupa Simulator Sistem Kendali Motor Berkinerja Tinggi Berbasis Simulink. Penciptaan produk ini dilatarbelakangi oleh kenyataan bahwa kegiatan praktik menggunakan peralatan real di lingkungan program studi Teknik Elektro khususnya materi Pengendalian Motor Berkinerja Tinggi memerlukan alokasi ruang dan biaya yang besar serta pada operasi berdaya tinggi mengandung resiko kerusakan pada mesin yang digunakan. Untuk itu, perlu dilakukan upaya-upaya menghasilkan produk berupa simulator sistem kendali motor induksi berkinerja tinggi berbasis SIMULINK yang layak digunakan sebagai perangkat praktik yang efisien, fleksibel dan aman.
Definisi Nama Produk
Sistem kendali motor berkinerja tinggi yang dimaksud dalam produk perangkat pembelajaran ini adalah sebuah gabungan piranti-piranti listrik dan elektronik yang dapat melakukan pengaturan tegangan catu untuk mereduksi lonjakan arus dan torsi saat mesin melakukan start-up. Selain itu, dalam keadaan steady-state, sistem dapat memutus catu tegangan secara otomatis ketika torsi beban melebihi torsi maksimum yang dibangkitkan, sehingga motor terhindar dari keadaan stall yang dapat menimbulkan kerusakan belitan motor. Sedangkan SIMULINK adalah kelengkapan dari pemrograman Matlab yang dapat digunakan untuk pemodelan, simulasi dan analisis sistem dinamis dengan mudah menggunakan blok.Tampilan panel-panel produk simulator ditinjukkan seperti pada Gambar 1 berikut ini.
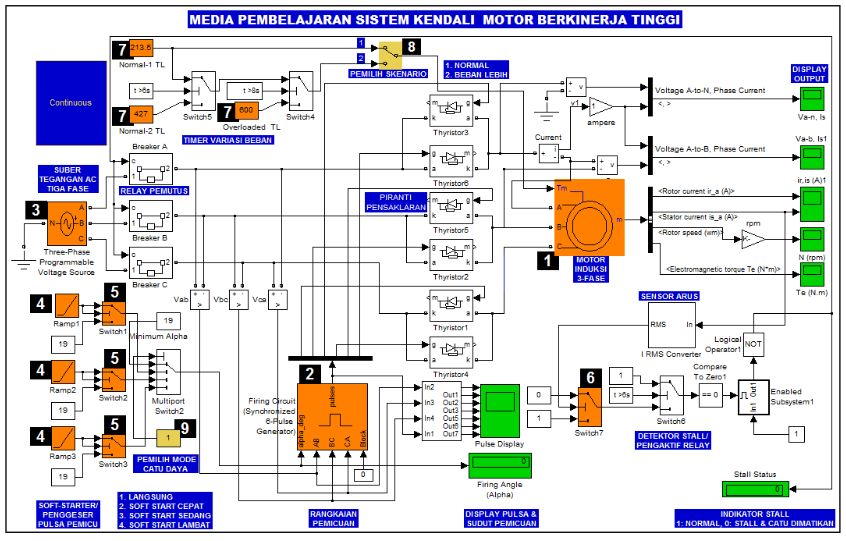
Gambar 1. Panel Simulator Sistem Kendali Motor Listrik Berkinerja Tinggi
Kegunaan dan Spesifikasi Produk
Simulator ini dapat digunakan oleh para dosen Teknik Elektro atau guru Sekolah Menengah Kejuruan (SMK), sebagai media pembelajaran yang terkait dengan materi karakteristik motor induksi tiga fase berkinerja tinggi yang dikendalikan menggunakan thyristor terpicu. Simulator juga dapat digunakan oleh mahasiswa Teknik Elektro maupun siswa SMK dalam membantu belajar mandiri tentang sistem pengendali motor yang dilengkapi dengan unit soft-starter dan unit stall-detector. Spesifikasi produk yang saya ciptakan dapat dilihat pada tabel berikut ini.
Unit-unit Produk
1. Unit Input
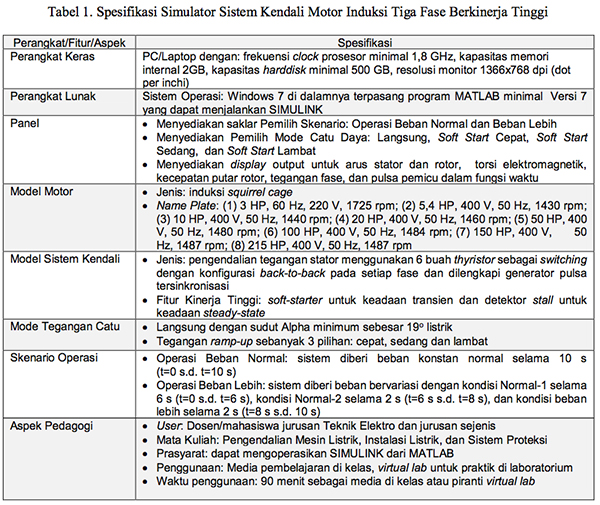
Pada unit ini terkandung sumber tegangan AC tiga fase yang berfungsi memberikan catu daya pada sistem yang dibangun. Sumber tegangan ini diambil dari Simulink Library/SimPowerSystems/Electrical Sources/Three-Phase Programmable Voltage Source seperti ditunjukkan pada Gambar 2.
Gambar 2. Sumber Tegangan AC Tiga-Fase dan Pengaturan Parameternya Untuk Motor 3HP
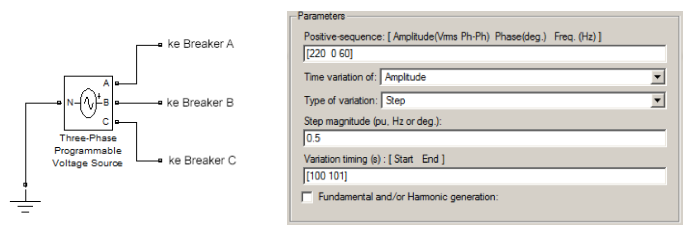
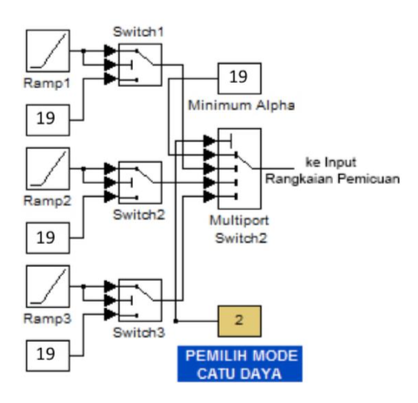
Unit lain yang tersemat di dalam unit input adalah pemilih jenis catu yang menyediakan empat pilihan yakni direct-on-line supplied dengan sudut pemicuan alfa konstan (pilihan 1), dan soft-start cepat (pilihan 2), sedang (pilihan 3) dan lambat (pilihan 4). Pada dasarnya, pemilih jenis catu adalah rangkaian dengan komponen utama saklar multiport yang memiliki empat buah input dan satu buah output. Salah satu inputnya dihubungkan ke sumber nilai alfa konstan, dan tiga input lainnya ke penggeser nilai alfa, sementara outputnya ke rangkaian pemicuan. Unit ini dilengkapi dengan blok pemilih (berwarna kuning) yang memungkinkan dapat diisikan ke dalamnya suatu konstanta melalui key in sebagai pengendali saklar multiport seperti ditunjukkan pada Gambar 3.
 Gambar 3 Pemilih Jenis Catu (Supply Mode Selector)
Gambar 3 Pemilih Jenis Catu (Supply Mode Selector)
Rangkaian terakhir pada unit input adalah pemilih skenario. Sebagai perangkat pembelajaran, operasi motor pada simulator ini perlu dikondisikan dalam berbagai situasi untuk menunjukkan kemampuan sistem kendali dalam mengantisipasi melonjaknya arus dan torsi saat start-up serta mengantisipasi perubahan-perubahan torsi beban saat steady-state yang dapat menyebabkan stall. Perangkat ini menyediakan dua jenis skenario operasi yakni normal (normal operation) dan beban lebih (overloaded operation). Nilai torsi beban agar motor beroperasi secara normal maupun dalam keadaan overloaded untuk masing-msing jenis motor seperti ditunjukkan pada Tabel 2 berikut ini.
Tabel 2. Beban Motor Untuk Operasi Normal dan Overloaded
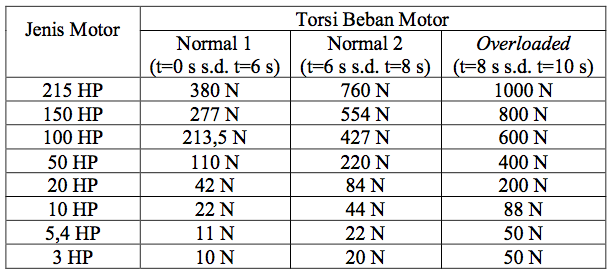
Pemilihan skenario pertama (operasi normal) akan menyebabkan motor diberi torsi beban konstan yang besarnya sesuai dengan kolom Normal 1 pada Tabel 2 selama waktu berlangsungnya simulasi. Pada mode normal ini, motor tidak mengalami gangguan penambahan beban baik beban normal maupun beban lebih selama keadaan transien sampai dengan steady-state. Skenario kedua adalah motor diberi beban yang berubah setelah kondisi transien, yakni sesaat setelah t=6 s dengan beban seperti pada kolom Normal 2 dan sesaat setelah t=8 s seperti pada kolom Overloaded. Gangguan pertama dengan tambahan torsi beban seperti pada kolom Normal 2 menyebabkan arus stator dan torsi elektromagnetik meningkat namun tidak menimbulkan keadaan stall, sedangkan gangguan kedua dengan torsi beban seperti pada kolom Overloaded menyebabkan arus stator dan torsi naik melebihi torsi yang dapat dibangkitkan motor, sehingga menyebabkan kondisi stall. Pemilih skenario berbentuk saklar seperti ditunjukkan pada Gambar 4. Arti dari notasi pada saklar adalah 1 untuk normal operation dan 2 untuk overloaded operation.

Gambar 4. Saklar Pemilih Skenario: (a) Normal Operation (Kiri) , (b) Overloaded Operation (Kanan)
2. Unit Pengendali
Rangkaian utama dari sistem yang dibangun ini adalah pengendali tegangan menggunakan thyristor yang dipicu oleh pulsa tersinkronisasi seperti ditunjukkan pada Gambar 5. Pada gambar tersebut, terlihat rangkaian unit pengendali tersusun atas piranti pensaklaran thyristor dan rangkaian pemicuan (firing circuit).

Gambar 5. Pengendali Tegangan Mengandung Piranti Pensaklaran Thyristor dan Rangkaian Pemicuan Versi SIMULINK
Sub unit lain yang terdapat dalam unit pengendali adalah rangkaian penggeser pulsa yang merupakan sumber dari rangkaian pemicuan. Rangkaian penggeser pulsa pada dasarnya adalah pembangkit bilangan decrement untuk sudut pemicuan alfa, yakni rangkaian yang dapat membangkitkan nilai alfa dari nilai maksimum menuju nilai minimum dalam satuan derajat listrik. Rangkaian penggeser pulsa pemicuan dalam format SIMULINK disajikan pada Gambar 6. Blok Ramp akan membangkitkan pulsa pemicuan dengan nilai awal yang tinggi, selanjutnya nilai ini diturunkan seiring dengan bertambahnya waktu. Setelah mencapai nilai threshold (torsi elektromagnetik mencapai nilai maksimumnya), blok Switch akan memilih sudut pemicuan minimum untuk disalurkan ke input rangkaian pemicuan melalui saklar multiport. Rangkaian pemilih jenis catu dan penggeser pulsa membentuk unit soft-starter yang merupakan unit dari sistem kendali motor berkinerja tinggi.
Gambar 6. Rangkaian Penggeser Pulsa Dalam Format SIMULINK
Selain sub unit soft-starter, sub unit lain pada unit pengendali adalah stall detector yang terdiri atas rangkaian sensor arus/torsi maksimum, pengaktif relay, dan relay pemutus seperti ditunjukkan pada Gambar 7.

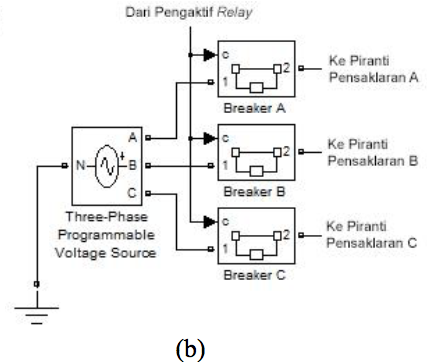
Gambar 7. Unit Stall Detector Terdiri Atas: (a) Pengaktif Relay dan (b) Relay Pemutus
Cara kerja unit stall detector dapat dijelaskan sebagai berikut. Jika arus stator yang berasal dari sensor arus masih di bawah batas ambang atau threshold–bersesuaian dengan kondisi torsi maksimum–maka Switch7 akan memilih nilai 1 pada terminal input bawah untuk disalurkan ke outputnya yang ditangkap oleh Switch6 sebagai input. Namun, jika arus yang masuk ke Switch7 melebihi batas ambang, saklar ini akan memilih nilai 0 pada input atas untuk diteruskan ke outputnya. Switch6 dikendalikan oleh timer dengan pengaturan akan bekerja menyalurkan input atas, jika waktu running motor sudah lebih besar dari 6 detik, sebaliknya akan menyalurkan input bawah untuk t<6 detik. Jadi, jika setelah 6 detik dari saat motor melakukan starting, terjadi kenaikan torsi beban yang menyebabkan arus stator juga naik namun masih di bawah batas ambangnya, maka input bawah dari Switch6 akan bernilai 1 (berasal dari Switch7) yang menyebabkan outputnya bernilai 1. Rangkaian compare to zero akan memberikan output 0 karena nilai inputnya 1, sehingga rangkaian enable subsystem tidak memperoleh pemicuan, berakibat outputnya 0, dan setelah masuk operator NOT outputnya bernilai 1 yang diperlukan sebagai sinyal pengendali relay agar keadaannya tertutup.
Sebaliknya, jika arus stator terdeteksi melebihi batas ambang, maka Switch7 akan memilih input atas yang bernilai 0 untuk disalurkan ke outputnya, berakibat input bawah Switch6 bernilai 0. Oleh karena t>6 detik, maka input bawah ini akan dipilih oleh Switch6 dan disalurkan ke outputnya. Nilai output Switch6 yang bernilai 0 ini oleh piranti compare to zero diubah menjadi bernilai 1 yang akan memicu enabled subsystem sehingga menyalurkan nilai 1 pada input ke outputnya. Sebagai piranti yang bersifat latched (mengunci), enabled subsystem akan mempertahankan nilai 1 ini sampai terdapat pemicuan kembali dan oleh operator NOT nilai ini diubah menjadi bernilai 0. Selanjutnya output operator NOT ini akan berfungsi sebagai sinyal pengaktif untuk mematikan relay.
Unit pengendali lain adalah rangkaian timer untuk pemberian variasi beban motor. Rangkaian ini, seperti ditunjukkan pada Gambar 8, digunakan untuk mendukung implementasi skenario normal operation dan overloaded operation.
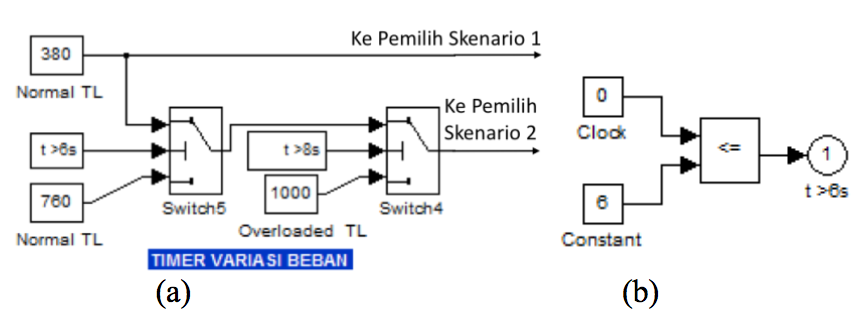
Gambar 8. Timer Pemberian Variasi Beban Untuk Motor 215 HP: (a) Rangkaian; (b) Struktur Timer
Sesuai dengan rancangan skenario, pemberian variasi beban dilakukan setelah keadaan transien dan dipilih t>6 detik. Untuk jenis motor 215 HP, pada skenario operasi normal, sejak saat awal motor melakukan start-up, beban normal 380 N m langsung disalurkan ke motor, dan untuk skenario beban bervariasi, setelah t>6 detik Switch5 akan menyalurkan beban 760 N m (masih dalam kategori normal), dan setelah t>8 detik Switch4 akan menyalurkan beban lebih 1000 N m ke motor (torsi beban lebih).
3. Unit Output
Unit output dari sistem yang dibangun terdiri atas sebuah motor induksi tiga fase dan unit display yang meliputi display arus stator dan rotor, kecepatan putar rotor, torsi elektromagnetik, tegangan eksitasi, tegangan dan arus fase seperti ditunjukkan pada Gambar 9.
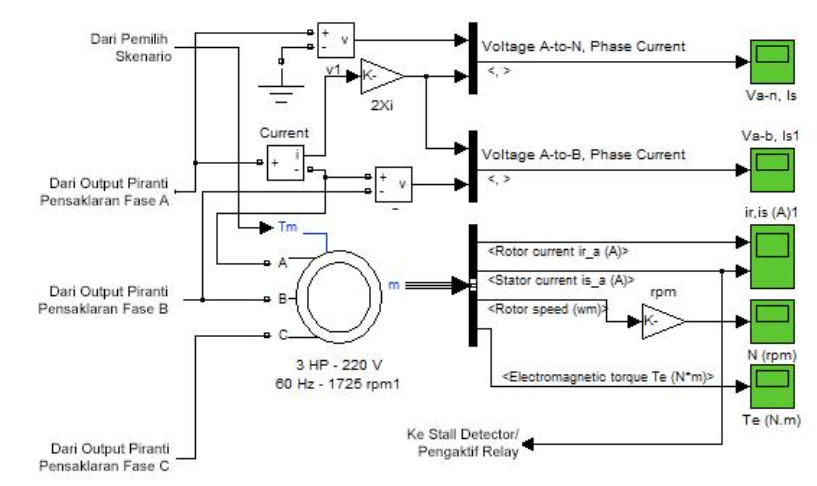
Gambar 9. Unit Output Terdiri Atas Motor Induksi Tiga Fase dan Sub Unit Display
Uji Coba Produk
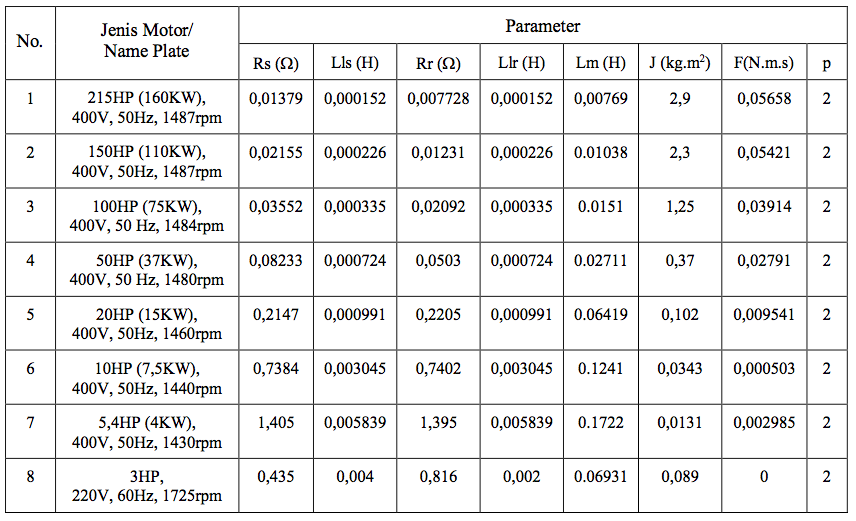
Produk telah menjalani uji kinerja melalui uji on-going dengan tiga tahap pengujian menggunakan 8 jenis motor induksi tiga fase yang mewakili motor berdaya kecil, sedang dan tinggi. Motor yang digunakan sebagai sampel uji coba produk ditunjukkan pada tabel 2.
Tabel 2. Motor Sampel Uji Coba Produk
Sebagai media pembelajaran, produk juga telah menjalani alpha testing kepada calon pengguna dosen dan mahasiswa. Hasil uji coba simulator ini tersaji pada uraian berikut ini.
1. Uji Kinerja Sistem Kendali Utama
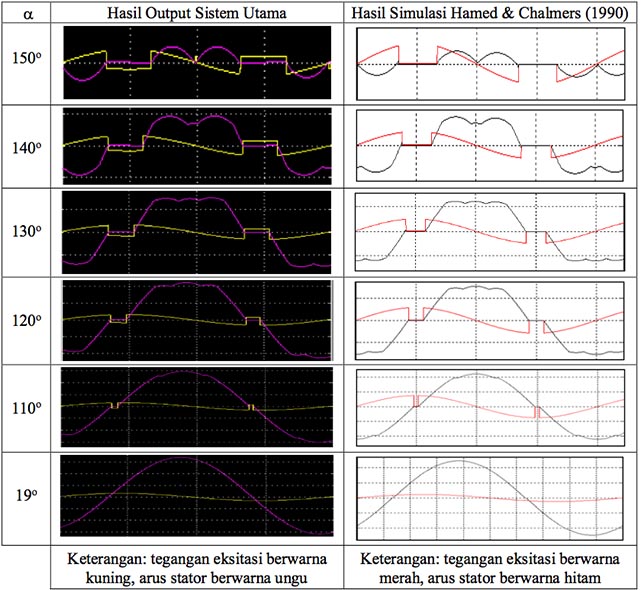
Uji kinerja dilakukan dengan membandingkan output sistem kendali utama yang dibangun dalam bentuk gelombang tegangan eksitasi dan arus fase terhadap hasil penelitian terdahulu yang dianggap valid. Hasilnya ditunjukkan pada Tabel 3.
Tabel 3. Perbandingan Bentuk Gelombang Tegangan Eksitasi dan Arus Pada Sistem Utama Terhadap Hasil Simulasi Hamed & Chalmers Untuk Berbagai Sudut Pemicuan
Untuk tegangan dan arus fase-ke-fase, perbandingannya pada berbagai sudut pemicuan thyristor dapat disajikan melalui Tabel 3 berikut ini.
Tabel 4. Perbandingan Bentuk Gelombang Tegangan Fase-ke-Fase dan Arus Pada Sistem Utama Terhadap Hasil Simulasi Hamed & Chalmers (1990) Untuk Berbagai Sudut Pemicuan
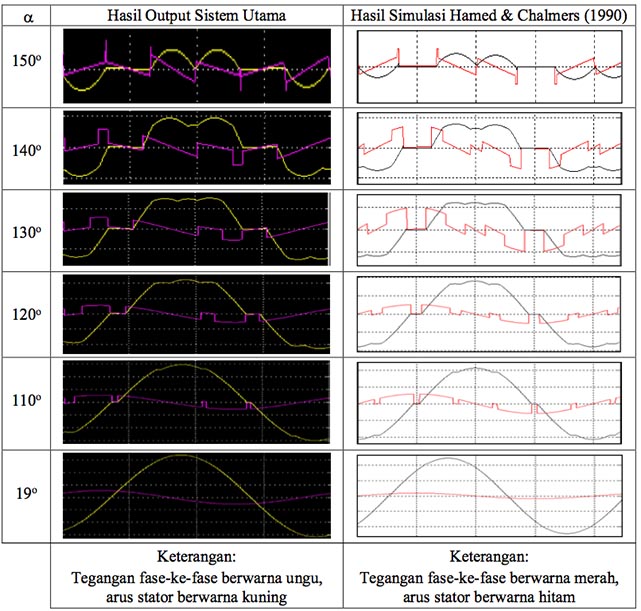
Dari kedua tabel di atas terlihat bahwa bentuk gelombang tegangan eksitasi maupun fase-ke-fase dan arus stator dari sistem utama yang dibangun mirip dengan bentuk gelombang dan arus motor hasil simulasi Hamed dan Chalmers. Hal ini mengindikasikan bahwa sistem utama yang dibangun telah dapat bekerja dengan baik.
2. Uji Kinerja Unit Soft-Starter
Hasil uji kinerja unit ini untuk salah satu jenis motor ditunjukkan pada Gambar 10.

Gambar 10. Indikator Keberhasilan Unit Soft-Starter Secara Visual
Dari Gambar 10 terlihat bahwa starting current yang dibangkitkan oleh motor induksi yang dioperasikan menggunakan catu daya langsung (direct-on-line supplied) nilainya sangat tinggi, namun nilai arus tersebut berkurang ketika sistem utama dijalankan dengan unit soft-starter, dan reduksinya semakin besar untuk kecepatan tegangan ramp-up yang semakin rendah (soft-start lambat). Jadi, sistem kendali soft-start yang dibangun telah dapat melakukan fungsinya dengan baik yakni mampu melakukan reduksi arus starting sehingga nilainya berkurang saat motor melakukan start-up.
3. Uji Kinerja Stall-Detector
Hasil uji kinerja unit stall-detector ditunjukkan pada Gambar 11. Dari Gambar tersebut dapat dilakukan analisis perbandingan karakteristik dinamis motor induksi yang dihasilkan oleh sistem kendali soft-start sebelum dan sesudah dipasangi unit stall detector.
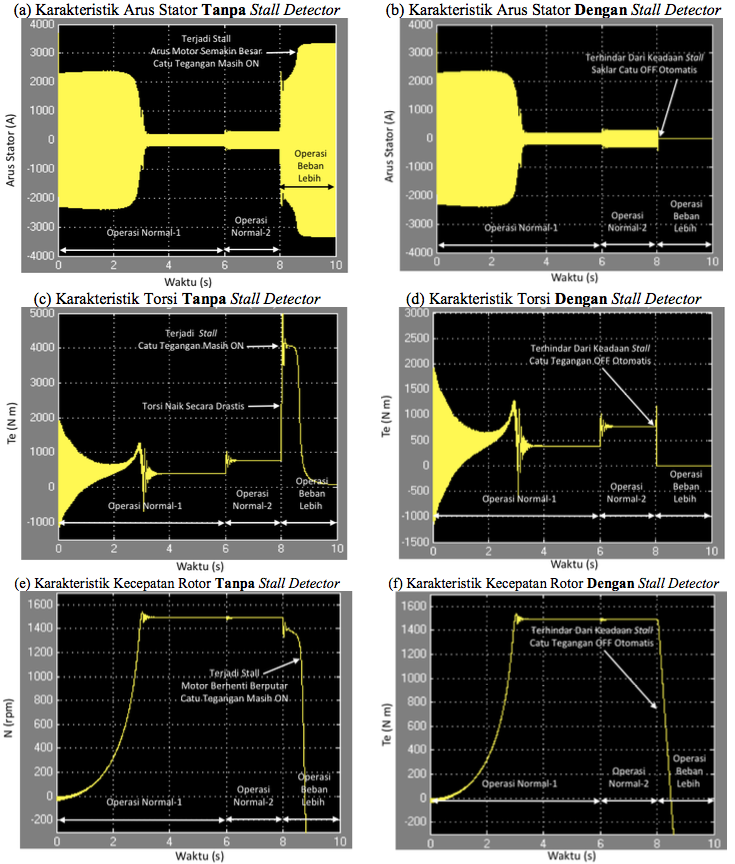
Gambar 11. Analisis Perbandingan Karakteristik Motor Untuk Sistem Kendali Soft-Start Sebelum dan Sesudah Dipasangi Stall Detector
Dari Gambar 11 (a) dan Gambar 11 (e), terlihat bahwa untuk operasi beban lebih pada sistem yang belum dipasangi stall detector, terjadi kenaikan arus stator dan torsi elektromagnetik sehingga melebihi batas ambang keamanan motor, menyebabkan motor mengalami keadaan stall. Keadaan stall ini ditunjukkan oleh menurunnya secara drastis kecepatan putar rotor, seperti ditunjukkan pada Gambar 11 (e), sehingga motor menjadi berhenti berputar sementara catu tegangan masih terpasang yang ditunjukkan oleh masih munculnya arus stator seperti pada Gambar 11 (a). Dari analisis ini dapat diperoleh kesimpulan bahwa sistem kendali yang belum dipasangi unit stall detector, pemberian torsi beban lebih dapat menyebabkan motor mengalami stall, yakni motor berhenti berputar tetapi catu tegangan masih terpasang (ON) pada inputnya.
Sementara itu, pada Gambar 11 sebelah kanan, terlihat bahwa motor induksi yang dikendalikan oleh sistem kendali soft-start yang dilengkapi dengan stall detector, pada saat menerima beban lebih arus statornya menunjukkan nilai nol yang berarti tidak ada arus yang mengalir pada belitan statornya, seperti ditunjukkan pada Gambar 11(b). Hal ini mengindikasikan bahwa stall detector yang terpasang pada sistem telah bekerja mendeteksi arus lebih akibat pemberian beban lebih, dan ketika arus tersebut melebihi batas ambangnya maka catu daya akan dimatikan sehingga tampak arusnya menjadi nol (Gambar 11b), motor tidak lagi membangkitkan torsi (Gambar 11d) dan motor berhenti berputar (Gambar 11f) bersamaan dengan matinya catu daya sehingga motor menjadi aman.
Download Panduan dan File Model SIMULINK dari Simulator:
http://muchlas.ee.uad.ac.id/downloads/motor-control.zip
Selamat menggunakan simulator ini.