![]() Rangkaian RC merupakan rangkaian elektronika yang tersusun atas komponen resistor (R) dan kapasitor (C) serta dicatu dengan sumber tegangan atau sumber arus. Pada domain waktu, rangkaian RC dapat dimanfaatkan sebagai pendeferensiasi sinyal (rangkaiannya disebut dengan diferensiator) dan rangkaian untuk mengintegralkan sinyal (rangkaiannya disebut dengan integrator). Selain itu, pada domain frekuensi, rangkaian RC dapat diaplikasikan sebagai rangkaian untuk menyeleksi frekuensi dari suatu sinyal. Dengan menggunakan rangkaian RC dapat dibuat filter low pass yang digunakan untuk meloloskan sinyal frekuensi rendah, filter high pass untuk meloloskan sinyal frekuensi tinggi, filter band pass untuk meneruskan sinyal dengan band frekuensi tertentu, dan filter band reject untuk menahan sinyal dengan band frekuensi tertentu.
Rangkaian RC merupakan rangkaian elektronika yang tersusun atas komponen resistor (R) dan kapasitor (C) serta dicatu dengan sumber tegangan atau sumber arus. Pada domain waktu, rangkaian RC dapat dimanfaatkan sebagai pendeferensiasi sinyal (rangkaiannya disebut dengan diferensiator) dan rangkaian untuk mengintegralkan sinyal (rangkaiannya disebut dengan integrator). Selain itu, pada domain frekuensi, rangkaian RC dapat diaplikasikan sebagai rangkaian untuk menyeleksi frekuensi dari suatu sinyal. Dengan menggunakan rangkaian RC dapat dibuat filter low pass yang digunakan untuk meloloskan sinyal frekuensi rendah, filter high pass untuk meloloskan sinyal frekuensi tinggi, filter band pass untuk meneruskan sinyal dengan band frekuensi tertentu, dan filter band reject untuk menahan sinyal dengan band frekuensi tertentu.
Rangkaian RC Pengisian Kapasitor
Rangkaian RC sederhana terdiri atas satu resistor, satu kapasitor, satu sumber tegangan DC, satu buah saklar dapat ditunjukkan seperti gambar di bawah ini.
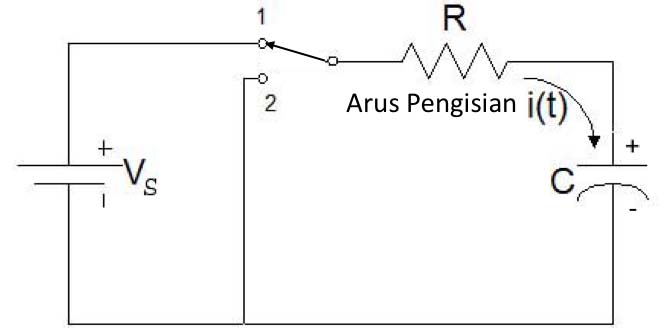
Gambar 1. Rangkaian RC Pengisian Kapasitor
Jika saklar diarahkan ke posisi 1 maka akan mengalir arus i(t) mengisi kapasitor C dan dalam keadaan ini dapat ditulis persamaan:

(persamaan 1)
Persamaan 1 dapat diselesaikan dengan metode pemisahan variabel. Langkah pertama adalah memisahkan notasi-notasi yang berhubungan dengan variabel muatan listrik (Q dan dQ) terhadap notasi yang berhubungan dengan variabel waktu (dt). Pada kasus ini, notasi Q dan dQ ditempatkan pada ruas kiri, sedangkan dt di ruas kanan persamaan, sehingga persamaan 1 dapat diubah bentuknya menjadi persamaan 2 berikut ini.
![]()
(persamaan 2)
Jika ruas kiri dan ruas kanan dibagi dengan -C, maka persamaan 2 dapat diubah bentuknya menjadi:
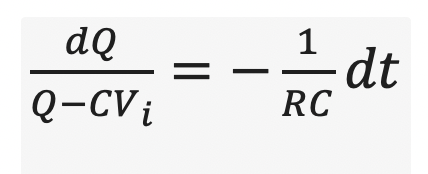
(persamaan 3)
Pengintegralan ruas kiri dan ruas kanan pada persamaan 3 menghasilkan persamaan:
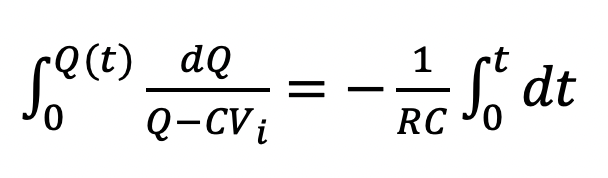
(persamaan 4)
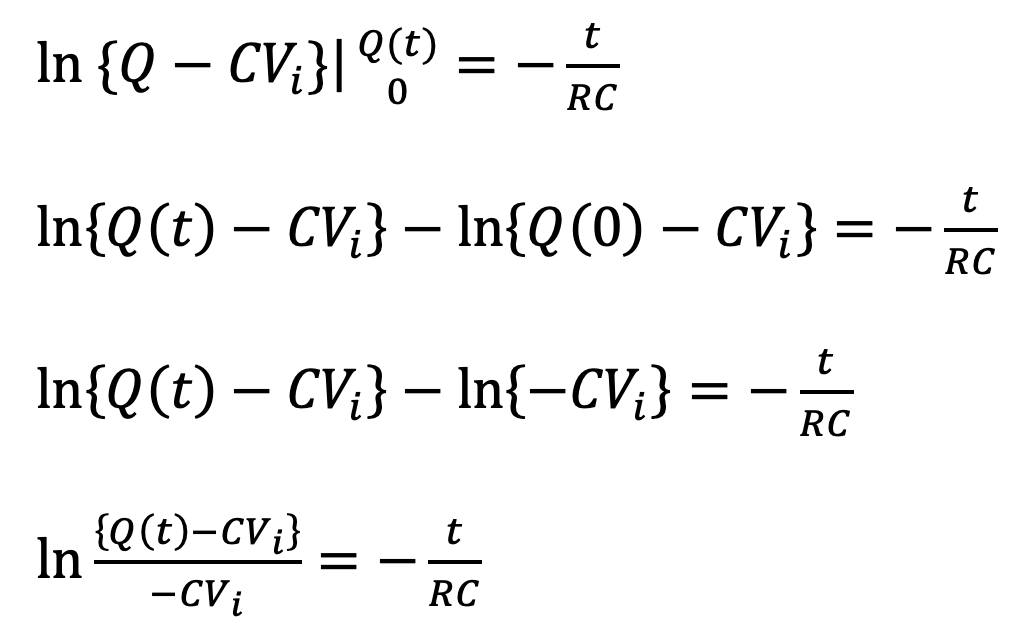
Berdasarkan rumus integral, telah diketahui bahwa ,
![]()
sehingga persamaan 4 dapat diubah menjadi:
Telah diketahui bahwa
![]()
sehingga apabila ruas kiri dan ruas kanan dari persamaan di atas menjadi pangkat dari e, maka akan dihasilkan persamaan:
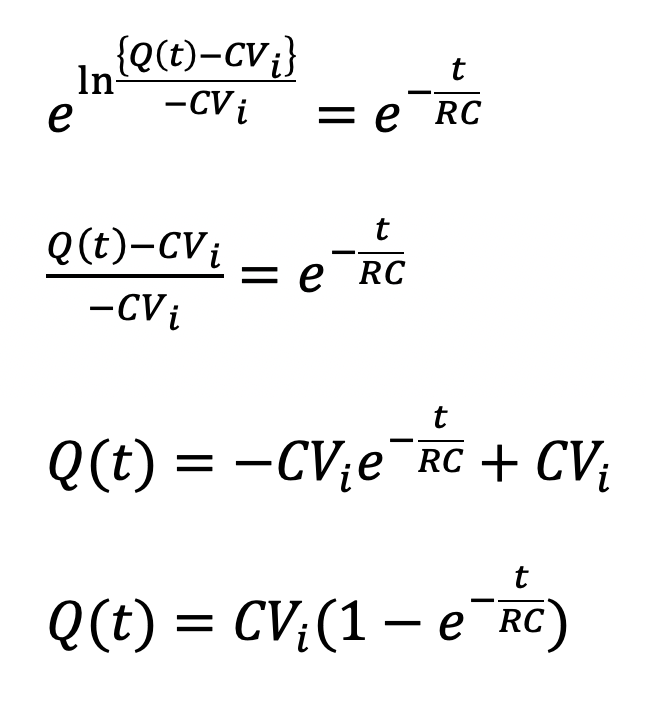
(persamaan 5)
Oleh karena muatan listrik yang mengisi kapasitor besarnya
![]()
maka tegangan kapasitor dapat diperoleh dengan melakukan substitusi persamaan ini ke dalam persamaan 5 sehingga diperoleh persamaan:
(persamaan 6)
Persamaan 6 menunjukkan besarnya tegangan kapasitor yang merupakan fungsi waktu t, sedangkan persamaan arus yang mengisi kapasitor dapat diturunkan dari persamaan 5. Oleh karena besarnya arus pada proses pengisian kapasitor didefinisikan sebagai besar muatan per satuan waktu, maka persamaan arus dapat diperoleh dengan menurunkan fungsi Q(t) pada persamaan 5 terhadap waktu t. Dengan demikian persamaan arus pada pengisian kapasitor dapat ditulis sebagai berikut.
Berdasarkan rumus diferensial, telah diketahui bahwa
![]()
sehingga persamaan dapat diubah menjadi:
(persamaan 7)
Pada persamaan 6 dan persamaan 7, keterangan untuk setiap notasinya adalah sebagai berikut.
Vc(t) = tegangan pada kapasitor (V)
i(t) = arus yang mengalir pada kapasitor setiap saat (A)
Vs = tegangan sumber (V)
e = bilangan natural=2,72
RC = Konstanta Waktu (time constant) dalam satuan detik (s)
Konstanta waktu diberi simbol tau, sehingga
![]()
(persamaan 8),
dengan R dalam ohm dan C dalam farad. Contoh jiika R=10K ohm dan C=0,1 mikro farad, maka
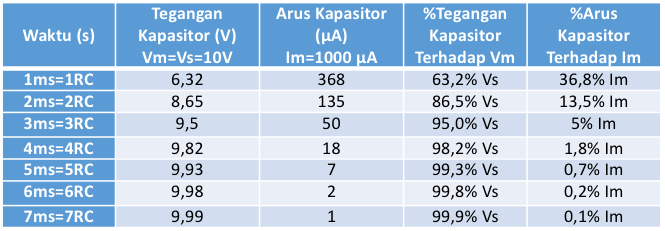
Persamaan 6 dan persamaan 7 menunjukkan besarnya tegangan dan dan arus kapasitor selama komponen tersebut mengalami pengisian muatan. Jika ke dalam kedua persamaan tersebut dimasukkan nilai-nilai variabel t untuk R=10K ohm dan C=0,1 mikro farad akan menghasilkan nilai-nilai tegangan dan arus kapasitor seperti ditunjukkan pada tabel 1 berikut ini.
Tabel 1. Nilai tegangan dan arus pada pengisian kapasitor untuk RC=1ms
Selanjutnya, jika dilakukan plotting antara Vc versus t akan diperoleh kurva pengisian kapasitor seperti pada gambar 2.
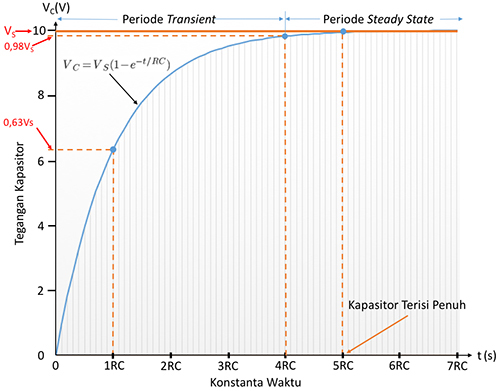
Gambar 2. Kurva tegangan kapasitor versus waktu selama pengisian muatan
Sedangkan plotting antara arus versus waktu selama pengisian kapasitor menghasilkan kurva seperti pada gambar 3 berikut ini.
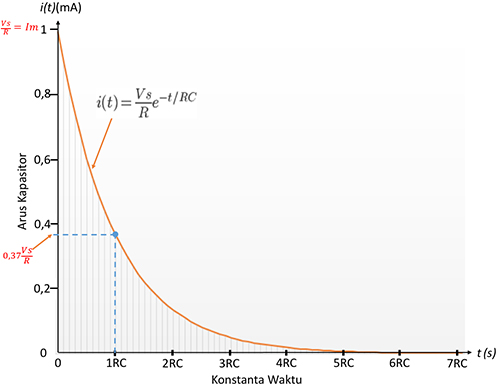 Gambar 3. Kurva arus kapasitor versus waktu selama pengisian muatan
Gambar 3. Kurva arus kapasitor versus waktu selama pengisian muatan
Rangkaian RC Pengosongan Kapasitor
Perhatikan kembali gambar 1 di atas! Pada saat saklar diarahkan ke posisi 1, rangkaian akan membentuk konfigurasi pengisian kapasitor. Andaikata kapasitor telah terisi penuh dengan muatan, saklar kemudian diarahkan ke posisi 2 maka rangkaian akan membentuk konfigurasi pengosongan kapasitor dengan arah arus terbalik menuju ke potensial nol.
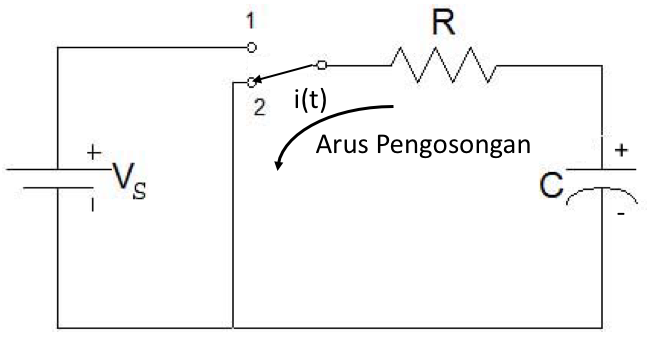
Gambar 4. Rangkaian RC Pengosongan Kapasitor
Dalam keadaan seperti ini Vs=0 dan persamaan tegangan menjadi:
(persamaan 9)
(persamaan 10)
Seperi halnya pada pegisian kapasitor, persamaan 10 yang menunjukkan arus pengosongan kapasitor dapat diselesaikan dengan metode pemisahan variabel. Dalam hal ini, notasi Q dan dQ ditempatkan pada ruas kiri, sedangkan dt di ruas kanan persamaan, sehingga persamaan 10 dapat diubah menjadi:
![]()
Jika ruas kiri dan ruas kanan diintegralkan, maka persamaan dapat diubah bentuknya menjadi:
Berdasarkan sifat bilangan natural, telah diketahui bahwa
![]() ,
,
sehingga apabila ruas kiri dan ruas kanan dari persamaan di atas menjadi pangkat dari e, maka akan dihasilkan persamaan:
(persamaan 11)
Oleh karena pada saat awal pengosongan kapasitor (t=0) nilai tegangan awal pada ujung-ujung kapasitor sama dengan nilai tegangan sumber
maka persamaan dapat ditulis dalam bentuk:
![]()
(persamaan 12)
Persamaan 12 menunjukkan tegangan kapasitor selama proses pengosongan muatan (discharging) berlangsung. Persamaan arus pengosongan dapat diturunkan dari persamaan 11. Oleh karena pada proses pengosongan kapasitor arusnya berkurang dari waktu ke waktu maka persamaannya dapat ditulis
![]()
(tanda negatif menunjukkan arus semakin lama semakin berkurang). Substitusi persamaan ini ke dalam persamaan 11 menghasilkan persamaan:
Pada saat awal (t=0), nilai muatan kapasitor maksimum, sehingga arus awalnya juga maksimum yakni sebesar
![]() .
.
Persamaan arus pengosongan dapat ditulis;
![]()
(persamaan 13)
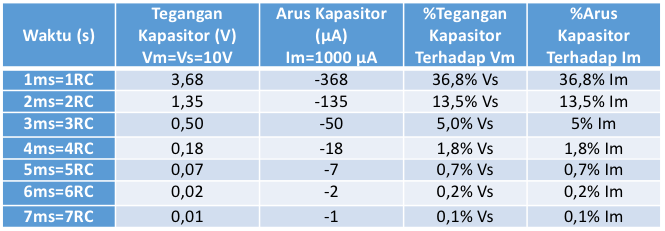
Persamaan 12 dan persamaan 13 menunjukkan besarnya tegangan dan dan arus kapasitor selama komponen tersebut mengalami pengosongan muatan (discharging). Jika ke dalam kedua persamaan tersebut dimasukkan nilai-nilai variabel t untuk R=10 K ohm dan C=0,1 uF akan menghasilkan nilai-nilai tegangan dan arus kapasitor seperti ditunjukkan pada tabel 2 berikut ini.
Tabel 2. Nilai tegangan dan arus pada pengosongan kapasitor untuk RC=1ms
Plotting antara Vc versus t akan diperoleh kurva pengosongan kapasitor seperti pada gambar 5 berikut ini.

Gambar 5. Kurva tegangan kapasitor versus waktu selama pengosongan muatan
Sedangkan plotting antara arus versus waktu selama pengosongan kapasitor menghasilkan kurva seperti pada gambar 6 berikut ini.
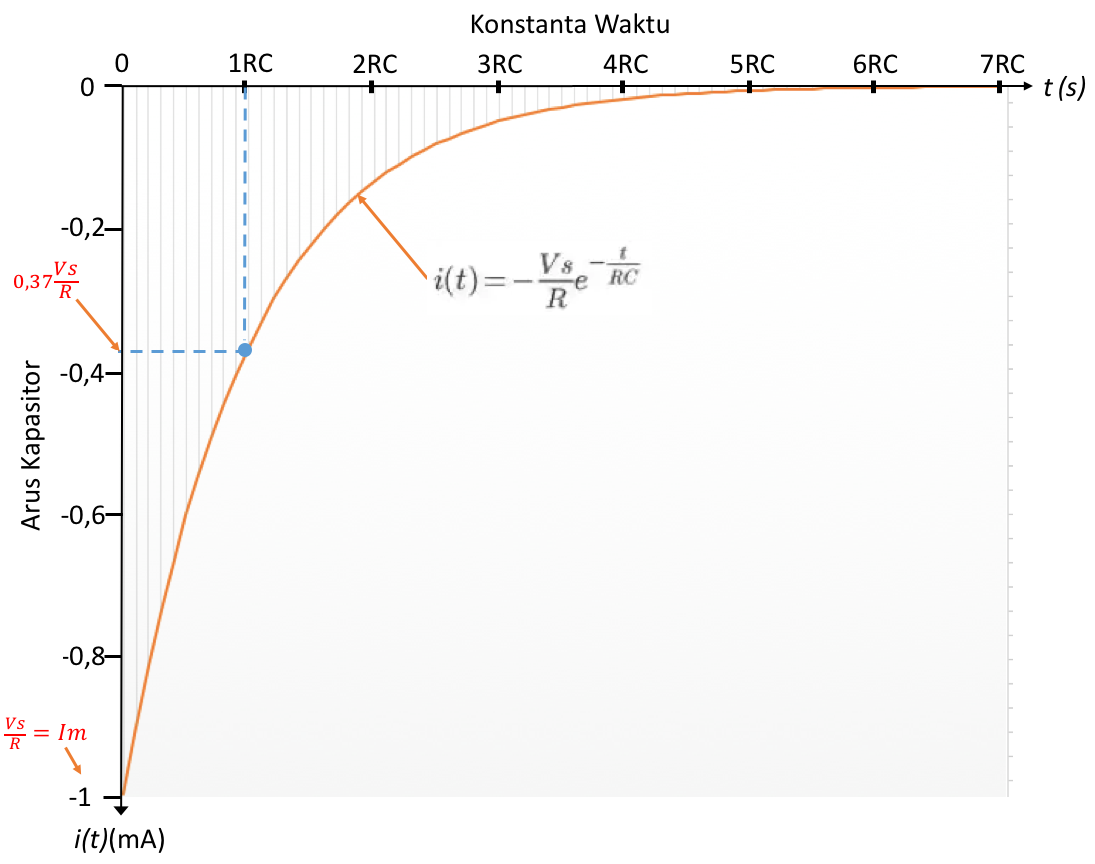
Gambar 6. Kurva arus kapasitor versus waktu selama pengosongan muatan
Simulasi menggunakan PSPICE
Simulasi fenomena pengisian dan pengosongan kapasitor menggunakan PSPICE dapat dilakukan dengan menyusun rangkaian seperti pada Gambar 7.
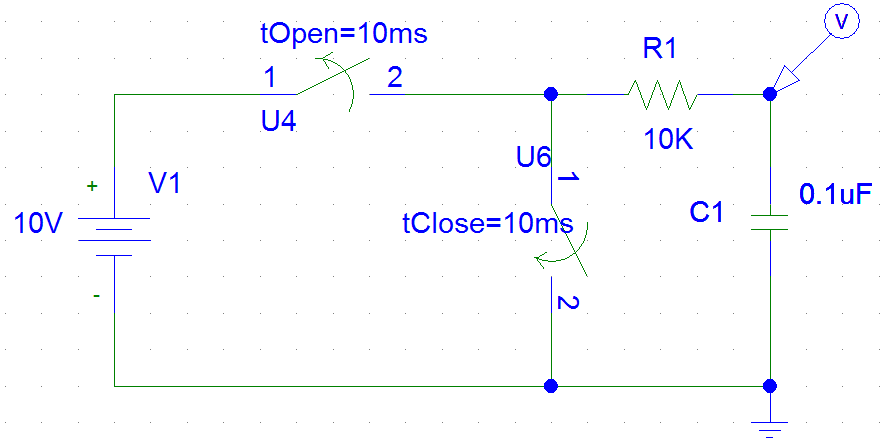
Gambar 7. Rangkaian Untuk Simulasi Pengisian dan Pengosongan Kapasitor Menggunakan PSPICE Dengan Output Tegangan
Rangkaiannya menggunakan komponen saklar tOpen dan tClose dengan nilai parameter masing-masing 10 ms. Sifat dari kedua saklar tersebut adalah sebagai berikut.
- tOpen selalu tertutup, saklar akan terbuka jika diberi nilai parameter tertentu misalnya 10 ms, artinya saklar akan terbuka setelah mencapai waktu10 ms.
- tClose memiliki sifat selalu terbuka, jika nilai parameternya diberi 10 ms, kondisinya akan tertutup setelah waktu mencapai 10 ms.
Pengaturan (setting) parameter simulasi agar tampilan grafik proporsional, dapat dilakukan dengan cara:
- Hitung terlebih dahulu RC time constant dalam hal ini RC=1ms
- Oleh karena kapasitor akan terisi penuh pada t=5RC, maka untuk pengisian kapasitor dapat diberikan waktu simulasi pengisian kapasitor misalnya dua kali 5RC yakni 10ms dan waktu pengosongan juga 10ms sehingga total waktu simulasi sebesar 20ms.
- Lakukan pengaturan seperti pada Gambar 8.
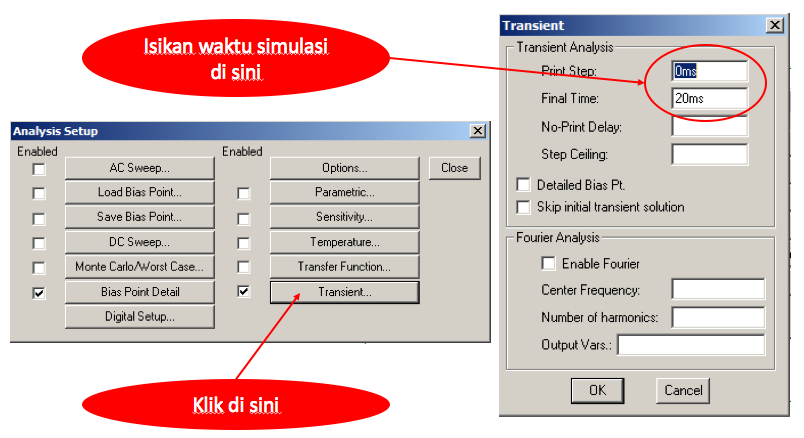
Gambar 8. Pengaturan Parameter Simulasi Pengisian dan Pengosongan Kapasitor
Jika pengaturan tersebut dilakukan dengan benar, maka proses simulasi pengisian dan pengosongan tegangan (rangkaian pada Gambar 7) akan menghasilkan grafik seperti pada Gambar 9.
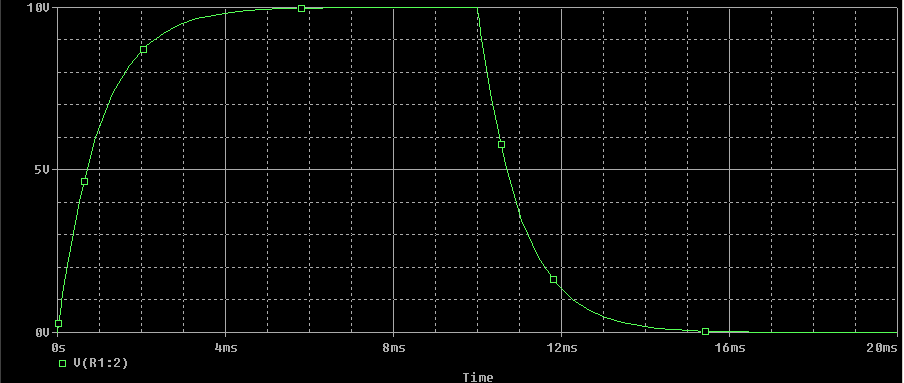
Gambar 9. Grafik Tegangan Pengisian (t=0 s.d. 10 ms) dan Pengosongan (t=10 s.d. 20 ms) Kapasitor Hasil Simulasi PSPICE
Penampilan grafik arus pada pengisian dan pengosongan kapasitor dapat dilakukan dengan mengganti voltage marker dengan current marker sehingga rangkaian menjadi seperti Gambar 10.
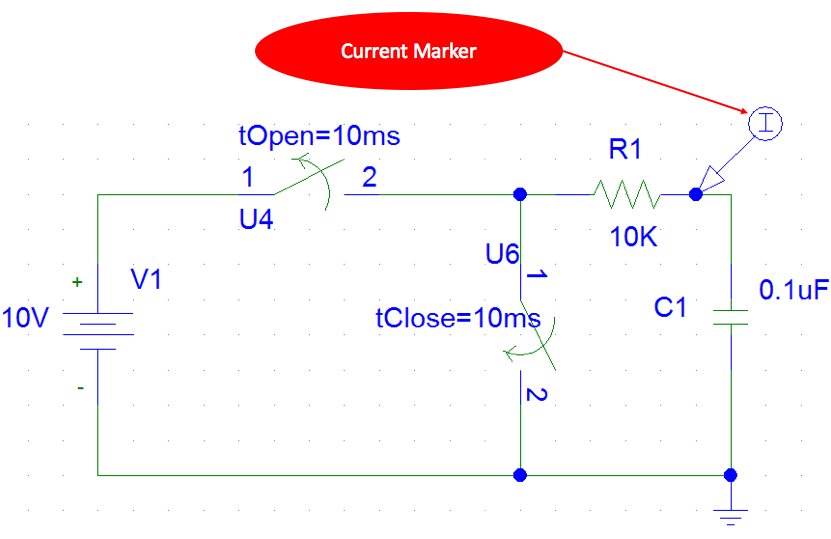
Gambar 10. Rangkaian Untuk Simulasi Pengisian dan Pengosongan Kapasitor Menggunakan PSPICE Dengan Output Arus
Hasil simulasi dengan menggunakan Gambar 10 ditunjukkan pada gambar 11 berikut ini.

Gambar 11. Grafik Arus Pengisian (t=0 s.d. 10 ms) dan Pengosongan (t=10 s.d. 20 ms) Kapasitor Hasil Simulasi PSPICE dengan Variabel terikat -I(R1)
Ubahlah variabel -I(R1) menjadi I(R1) sehingga tampilan grafik menjadi seperti pada gambar 12.

Gambar 12. Grafik Arus Pengisian (t=0 s.d. 10 ms) dan Pengosongan (t=10 s.d. 20 ms) Kapasitor Hasil Simulasi PSPICE dengan Variabel terikat I(R1)